

Overview
What is ROSMOD?
The Robot Operating System Model-driven development tool suite, (ROSMOD) an integrated development environment for rapid prototyping component-based software for the Robot Operating System (ROS) middleware.
ROSMOD consists of:
- The ROSMOD Server, which provides collaborative model-driven development, and
- The ROSMOD Comm layer, which extends ROS to provide a more well defined component execution model with support for prioritization of component event triggers.
Motivation
Robotics is a discipline that involves integration between heterogeneous fields such as electronics, mechanics, computer science, control theory and artificial intelligence. During the design, development and deployment of robotic systems, the components that belong to the various sub-systems, e.g., image processing software, servo-motors, power distribution system, etc., must work congruously to achieve a common goal. As systems increase in complexity, software development platforms must enable the creation of such components in a rapid, reliable, and reusable manner while also providing systems-level design, analysis, and deployment.
In other similar systems, users are often tasked with developing the models, generating the code, and then manually touching the generated code to implement the business logic for the various operations their system needs to perform (e.g. periodic or event-triggered functions). The injection and management of this user-developed code inside the generated code can increase the learning curve for new users as it adds some extra file management and build-system overhead. Additionally, almost all other similar projects require installation on the users' computers, which means they may need to troubleshoot setting up the IDE, the compiler, and any other required libraries (e.g. catkin, python, ssh, etc.) which will increase the time it takes to configure their system and increase the number of failure points in their configuration process (not to mention increasing the platform and version control support nightmare).
To combat these issues, we wanted ROSMOD to act as a lightweight (from the users' perspectives) IDE which does not require any installation, and can be run cross-platform since it only relies on a web-browser (even smartPhones can act as interfaces!). In this way, the development of robotics with ROSMOD is done in a decentralized, collaborative, automatically versioned development , with centralized management of the infrastructure (including any compatibility, package version management, and build / deployment infrastructure management).
Implementation
ROSMOD is implemented as a web-based graphical interface to a versioned, git-like database of models with integrated code. Along with this database exist server-side plugins which enable the generation, compilation, and deployment of executable code. This executable code is fully complete without the need for users to touch or even download the files. These plugins have accses to the file-system on the server, where the sys-admin for the ROSMOD webserver has already configured the build system and deployment infrastructure so that these plugins can automatically perform the compilation and deployment as requested by the users.
Features
- Integrated support for run-time monitoring using ROS Bridge
- Integrated support for run-time mission control / command and telemetry using NASA OpenMCT and ROSMCT
- Integrated Hierarchical Finite State Machine (HFSM) Modeling, Simulation, and Code Generation
- See webgme-hfsm for documentation, walkthroughs, videos, etc.

Collaborative, automatically versioned web-based development

Model-based framework for developing hardware and software

Fully integrated code development, with documentation generation

Fully integrated code generation, compilation, and deployment

Interactive deployment visualization

Embeddable documentation at every level of the model
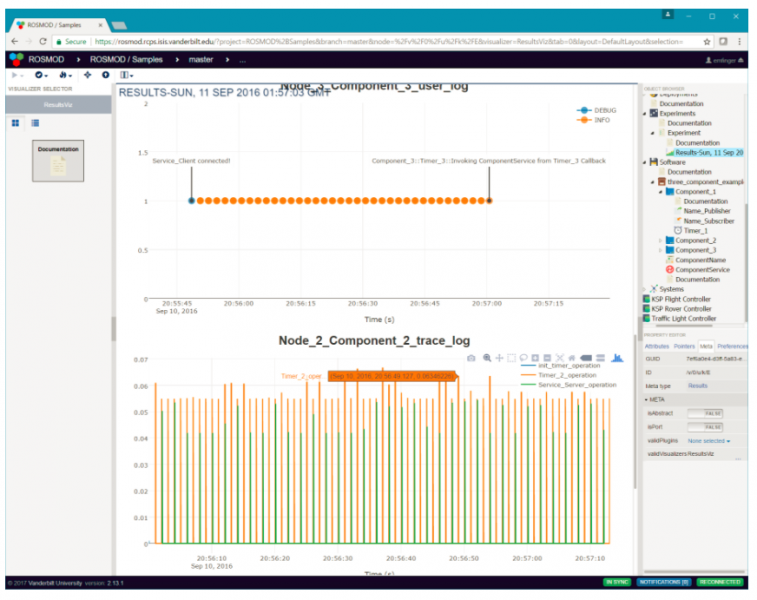
Distributed debugging enabled by automatic trace logging
and plotting of trace and user logs
Automatic load management of embedded targets