


 2019 CPS Challenge
2019 CPS Challenge
2019 CPS Challenge
"No robot left behind!"
May 14-16 2019
TIMPA airfield, 3250 N Reservation Rd, Marana, AZ 85653
IMAGINE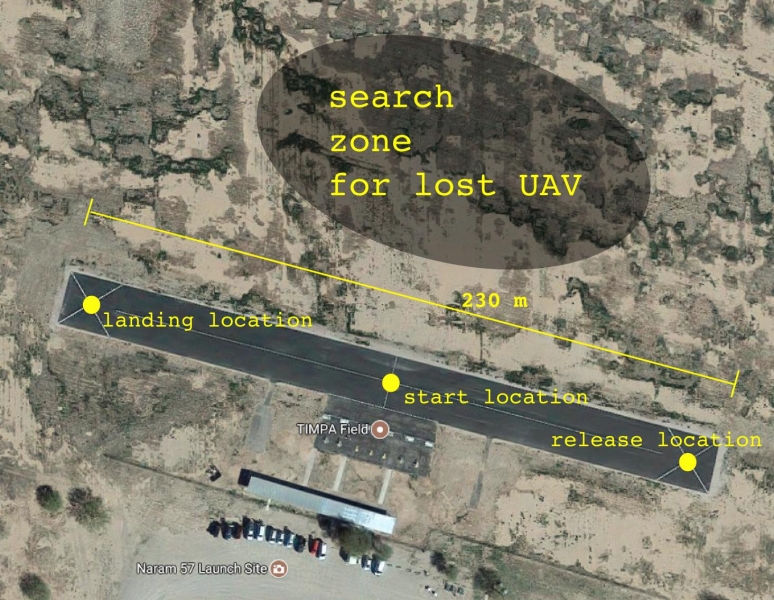
Your friend's quadrotor went down in a large field, and a storm is coming in. Looking for this lost drone needs a solution that could be repurposed to solve many other problems, like looking for a place to deploy a mosquito sensor.
GOAL
The goal of this challenge is to use a quadrotor aircraft with downward facing camera, and possibly other sensors, to scan an area for a lost aircraft, and recover it safely back to base.
Teams will be provided with powerful simulation tools on the CPS-VO, as well as support with hardware decisions.
Why participate?
-
Develop autonomy for UAV team, in a fun setting.
-
Engage in agile design iterations, both for software and hardware.
-
Experiment with complex mission scenarios using powerful cloud-based simulation tools.
-
Repurpose solution to other problems, such as searching for a strategic location to deploy and recover a sensor probe.
Scoring:
-
30/100 points for detection,
-
40/100 points for recovery,
-
20/100 points for release,
-
10/100 points for landing at base.
If quadrotors are under manual control for any portion of the task, team loses 50% of score for that task.
Ideal teams: The challenge is designed for undergraduate teams participating in a one semester course. Teams should have a mentor who is a graduate student, or a faculty member that can provide direction and suggest technical approaches. All solutions will involve both software and hardware.
Software: Teams should plan to use the Robot Operating System (ROS). Development can be done exclusively with Python, though C++ could be used as well. Sample code for a simple swarm flocking algorithm is available at the project GitHub repository. Potential teams are encouraged to join the project (See the "Join Us" balloon in the top-right corner of the header graphic above) .
Hardware: Any vehicle that supports the ROS compatible PX4 autopilot stack is suitable for the challenge. The vehicle should have on-board companion computer, and cameras that support ROS integration in order to facilitate algorithm implementation. Project organizers have listed a few compatible off the shelf and custom vehicles below.
-
Custom configuration for Penn AiR hexrotor (bill of materials)
Legal requirements:
- Team vehicle should have an FAA registration number. Go to https://faadronezone.faa.gov/ and register under section 336.
- The pilot in charge for each team will need to be a member of the Academy of Model Aeronautics (AMA) http://www.modelaircraft.org/ . The pilot will need to show their membership card at the event.
If you have questions, please contact Jnaneshwar Das
* See Previous CPS Challenges: https://cps-vo.org/group/arcompetitions
