


 2020 CPS Challenge
2020 CPS Challenge
SoilScope Mars edition winners Announced
Notice: as a result of the ongoing pandemic, the outdoor event scheduled for May 13-15 has been postponed to Spring 2021.
2020 CPS Challenge
"SoilScope -- Mars edition"
Virtual competition on CPS-VO: May 15 - June 15, 2020
Outdoor event: May 2021
Welcome webinar, background, rules -- recording, May 18, 2020
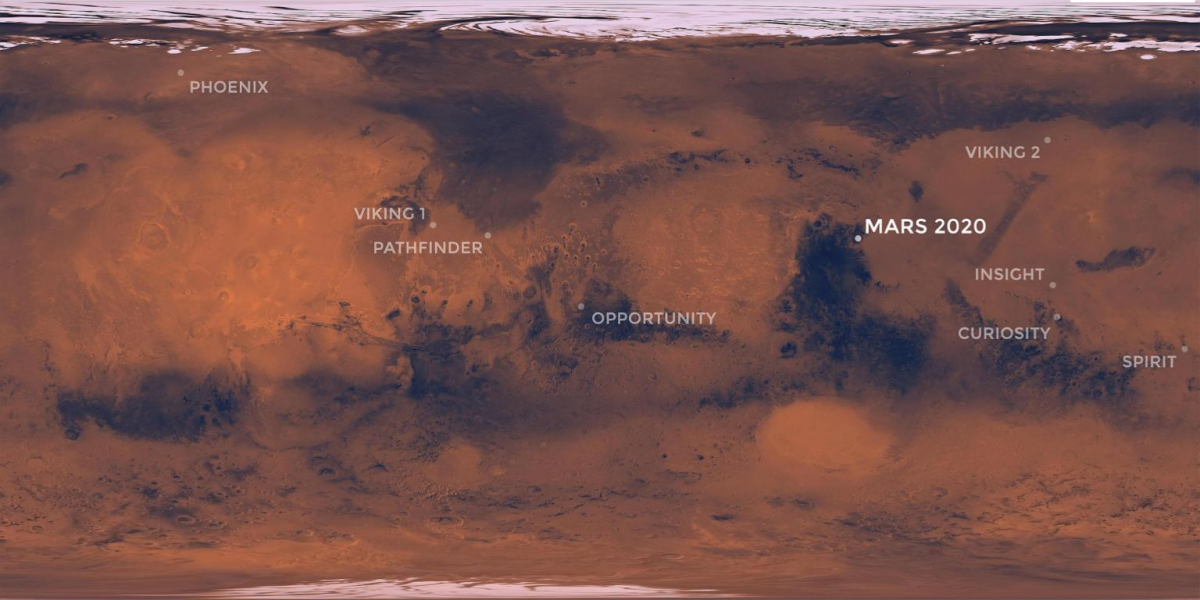
Mars 2020 inspired mission scenario for the 2020 NSF CPS Challenge will be a two week virtual event, emulating an autonomous probe deployment science mission by the rover and drone duo, at the Jezero crater landing site.
Teams will use the OpenUAV simulation testbed through this CPS-VO group. Here is a demo video of the simulation world.

Why participate?
-
Develop autonomous systems, in a fun setting.
-
Engage in agile design iterations.
-
Experiment with complex mission scenarios using powerful cloud-based simulation tools.
-
Repurpose solution to other problems, such as searching for a strategic location to deploy and recover a sensor probe for ecological studies.
Qualification round will involve only the drone, and Phase I and Phase II events will involve drone as well as rover.
Qualification round goals:
Use the drone's down camera, to search for the probe in the terrain (lower plain), recover it, and deploy it at a prescribed local coordinate of x = 25m, y = -35m. Example ROS launch file is provided, showcasing a docking logic that resembles our electro-permanent magnet based NSF CPS drone design. A demo of the probe docking and and release logic is shown at https://www.youtube.com/watch?v=gPhtxzkg1yw .
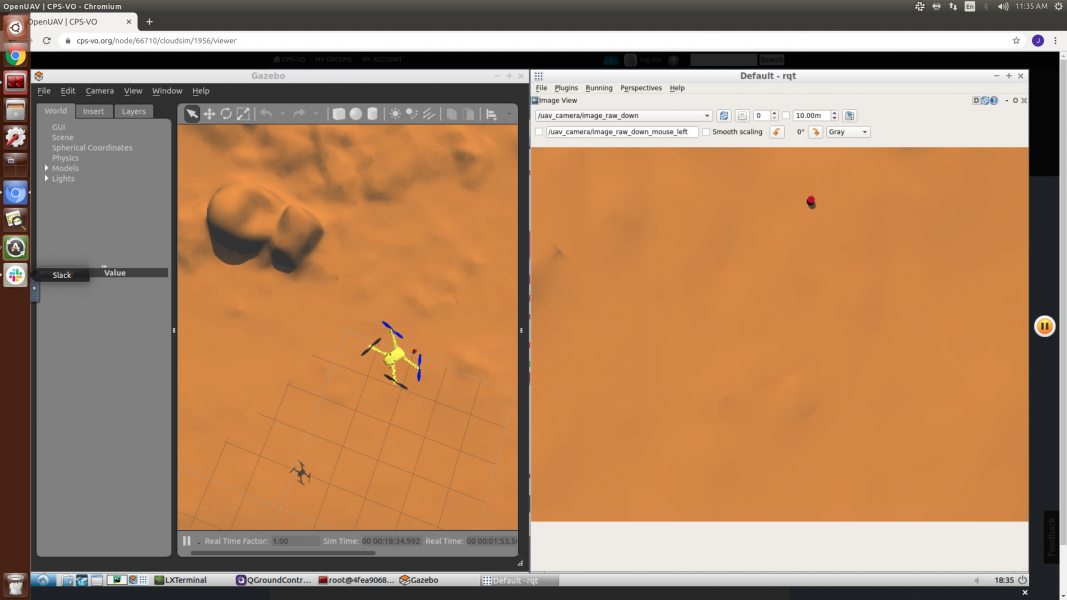
Screenshot showing drone in Volcanic Tablelands rock scarp terrain, and the images from down camera. The red dot on the right frame is the probe.
Here is a description of our soil sampling probe designed for ecological mapping, named 'EarthPod' . We emulate this as a cylinder in simulation.
Rules:
-
Solutions have to be autonomous, and written with ROS C++ or Python code with the Gazebo/PX4 environment.
-
The probe location should not be hardcoded in the autonomy code. Teams have to implement a search pattern on the lower plain of the Volcanic Tablelands rock scarp terrain model, to detect the probe.
-
One minute video of each task finished needs to be submitted, it should show at least three trials.
-
Code should be maintained on a GitHub repo for persistence and verification.
-
For qualifying, use of deep neural networks is not allowed. Use of OpenCV is encouraged. Avoid computationally intensive algorithms, since these are harder to deploy on constrained space-grade hardware.
Scoring:
We will test your code with different initial conditions, and observe success rate, mission time, efficiency (sum of squares of rotor commands), and probe deployment accuracy.
Software: Teams should plan to use the Robot Operating System (ROS) in a UNIX environment. Development can be done exclusively with Python, though C++ could be used as well. More information is available in the competition simulation environment (register to access).
Who owns the code produced by participants ?
You do, though by design, it will have to be open source under the BSD, Apache 2, or equivalent license. A core goal for this competition is to push the limits on reproducibility of research code.
Interested in participating?
Potential teams are encouraged to join the project (See the "Join Us" balloon in the top-right corner of the header graphic above) .
Technical committee:
Dr. Heather Throop, Arizona State University.
Dr. Hannah Kerner, University of Maryland.
If you have questions, please contact Jnaneshwar Das
![]()
![]()
![]()
* See Previous CPS Challenges: https://cps-vo.org/group/arcompetitions
